

Điều khiển và giám sát xe tự hành trên nền tảng máy tính nhúng và IoT với thuật toán điều khiển PID
Trên cơ sở các kết quả đạt được, nhóm nghiên cứu khoa học về xe tự hành do TS. Lê Xuân Hải (Viện Công nghệ HaUI) và nhóm sinh viên tài năng từ Khoa Điện tiếp tục nghiên cứu về “Xe tự hành định vị, bản đồ hóa trên nền tảng hệ điều hành ROS và phần cứng STM32 với máy tính nhúng Raspberry Pi 4 và công nghệ Lindar”
Trong kỷ nguyên cách mạng công nghiệp lần thứ tư, nhu cầu sử dụng robot cho công việc phức tạp thay thế cho con người ngày càng lớn, một robot tự hành có khả năng lấy thông tin về môi trường của nó và làm việc trong một thời gian dài mà không cần đến sự can thiệp của con người là thiết yếu.
Nghiên cứu, chế tạo và phát triển các robot tự hành, xe tự hành không người lái đang là xu hướng nghiên cứu tập trung của các nhà khoa học, công nghệ trên toàn thế giới. Với việc phát triển của ngành công nghiệp bán dẫn, xe tự hành ngày càng trở nên thông minh hơn, cùng khả năng lưu trữ, xử lí một lượng data lớn với tốc độ cao hơn. Dựa trên các công cụ phần cứng mạnh, robot giờ đây ứng dụng nhiều các hệ cảm biến mắt máy(camera 3D), cảm biến quét Laser (Lindar), cảm biến siêu âm… và đặc biệt ứng dụng công nghệ trí tuệ nhân tạo và xử lí ảnh vào việc nhận dạng, nhận biết và điều hướng thông qua các cảm biến đó. Với các công cụ, phần mềm lập trình truyền thống, việc xử lí đa tác vụ, nhiều loại kiểu dữ liệu và dung lượng cao như thế là rất khó khăn, và ROS là hệ điều hành lập trình chuyên dụng cho robot giải quyết được vấn đề này. ROS hiện nay được sủ dụng rộng rãi và gần như tối ưu cho viêc xây dựng hệ thống điều khiển cho các loại robot, robot tự hành, và xe tự lái trên toàn thế giới.
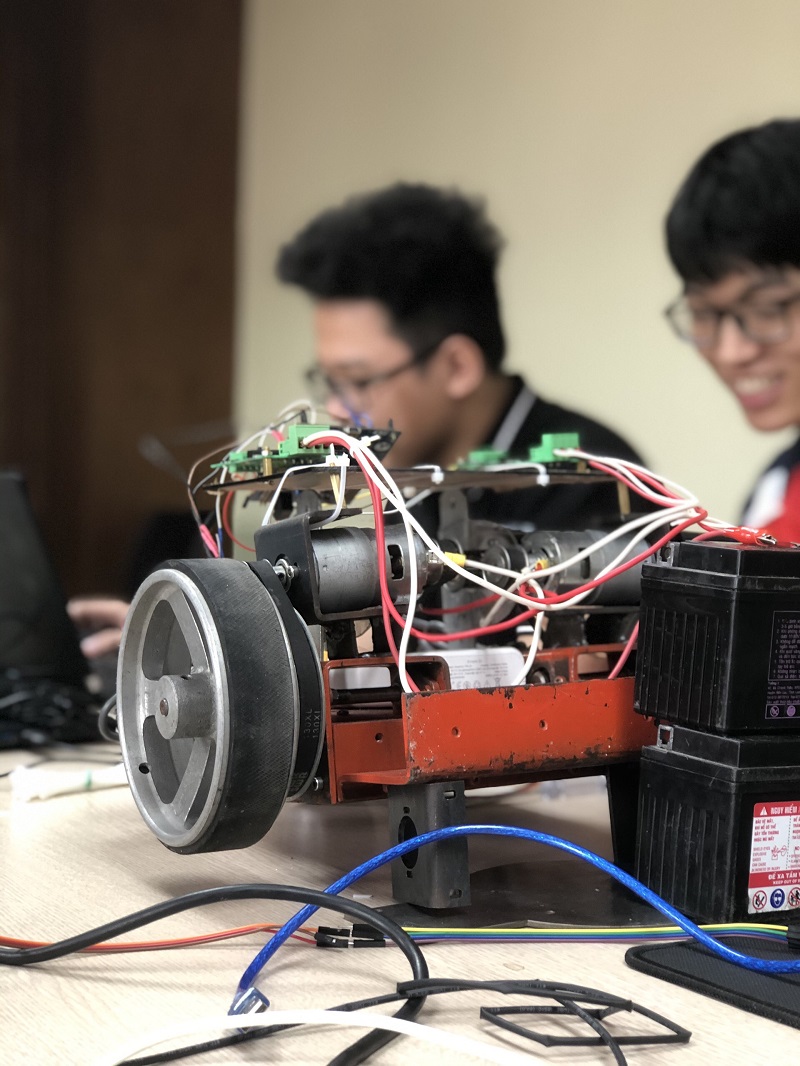
H1. Xe tự hành có sử dụng công nghệ Lindar
ROS – Robot Operating System là một hệ điều hành chuyên dụng cho lập trình robot được nghiên cứu và phát triển bởi đại học Stantford từ năm 2007. ROS bao gồm các công cụ, hệ thống thư viện khổng lồ cho phép nhiều loại ngôn ngữ lập trình như C++, Python…
Trong việc vận hành hệ điều hành này, việc tính toán trong ROS được thực hiện bằng cách sử dụng một mạng quy trình được gọi là các Node. Mạng tính toán này có thể được gọi là đồ thị tính toán (computation graph). Những thuật ngữ chính liên quan đến đồ thị tính toán là ROS Nodes, Master, Parameter, Server, Messages, Topics, Services, Bags. Mỗi khái niệm đều đóng vai trò khác nhau theo từng nhiệm vụ được minh họa trong H.2. Hoạt động giao tiếp giữa các Nodes dưới dạng chủ đề (Topics), tin nhắn(Messages), dịch vụ (Services) được minh họa như trong H.3
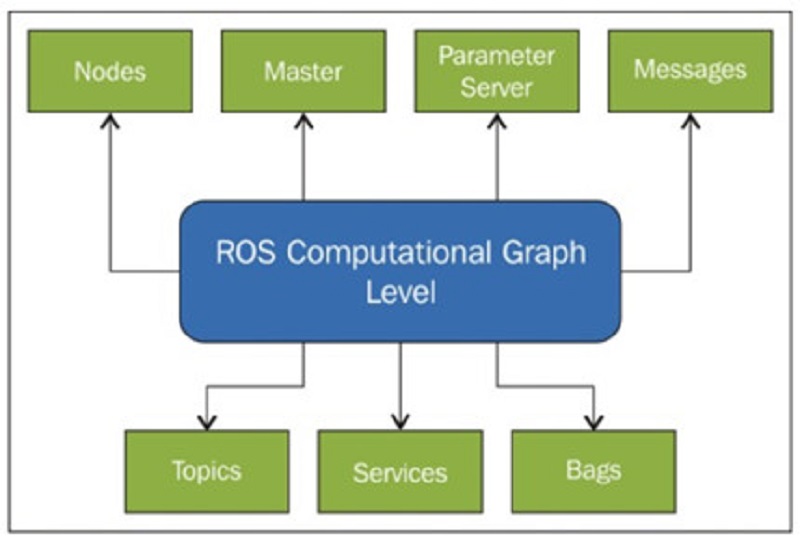
H. 2 Mối quan hệ và vai trò của các khối trong hệ điều hành ROS
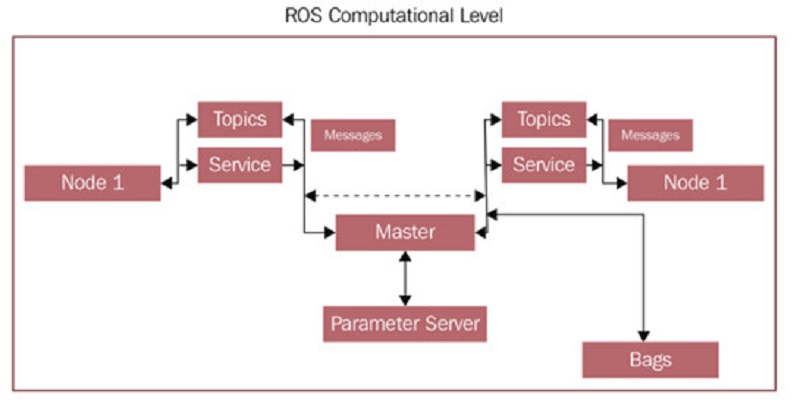
H.3 Cấu trúc mạng lưới ROS
SLAM (Simultaneous Localization And Mapping) là công nghệ tọa độ hóa và dựng lại bản đồ môi trường trong công nghệ xe tự hành. SLAM xây dựng lại bản đồ bằng cách thu thập các tín hiệu từ cảm biến được gắn trên robot như Lidar, Camera 3D…
Để thực hiện SLAM chúng tôi sử dụng một gói (package) là Hector SLAM cho WMR Robot bằng việc thu thập các dữ liệu từ RPLidar. Hector SLAM sử dụng Hector_Mapping Node để tìm hiểu bản đồ môi trường đồng thời ước tính tư thế 2D của robot với tốc độ khung hình quét của RPLidar.
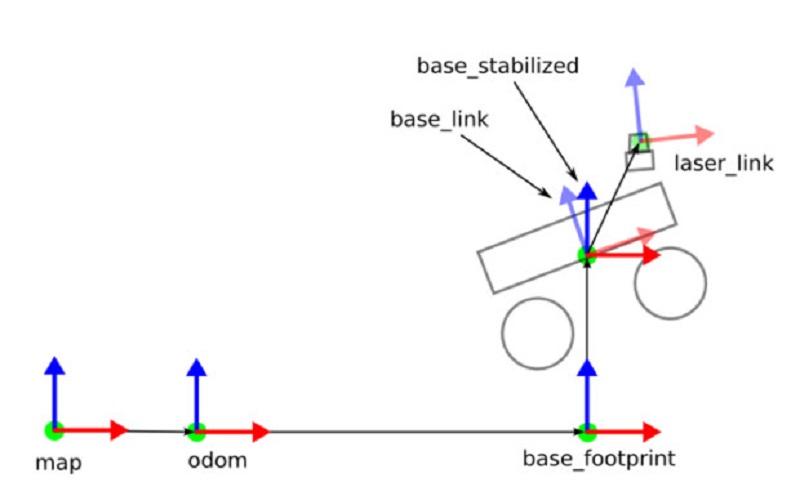
H.4 Ước tính tư thế của robot trong Hector SLAM
RVIZ là một phần mềm hữu ích giúp giám sát trực tiếp, trực quan 3 chiều của các loại cảm biến và hoạt động của robot. RVIZ truy xuất được các loại tín hiệu cung cấp trong môi trường ROS, ví dụ như cảm biến Lidar, IMU, GPS … RVIZ cũng sử dụng thông tin từ thư viện TF để hiện thị các thông tin trong khung tọa độ chung trong không gian 3 chiều. RVIZ trực quan hóa tất cả các dữ liệu trong cùng một ứng dụng giúp tôi nhanh chóng kiểm nghiệm độ chính xác của robot.
Nhóm đã chạy thành công các Tool trong hệ thống điều hành ROS cho ứng dụng cảm biến Lindar, với các kết quả chạy thực cho các ứng dụng xe tự hành có thể định vị, bản đồ hóa.
Trong phần thực nghiệm, chúng tôi thực nghiệm robot hoạt động ở một môi trường không biết trước. Mục đích là để robot tự hành và thu thập dữ liệu từ cảm biến RPLidarA1 cũng như xây dựng bản đồ hóa.
ROS là công cụ được chúng tôi sử dụng trong việc viết hệ điều hành cho MWR robot, đơn giản hóa việc vận hành cũng như kết nối các bộ phận của robot với nhau. Không những thế ROS còn có RVIZ là một công cụ mạnh mẽ giúp giám sát quá trình vận hành ở thời gian thực. Cài đặt cho robot như hình số 5. Quá trình tự hành và dựng lại bản đồ hóa của tầng 10 toàn nhà A1 Đại học Công nghiệp Hà Nội (Hình 6)

H.5 Cài đặt cho robot
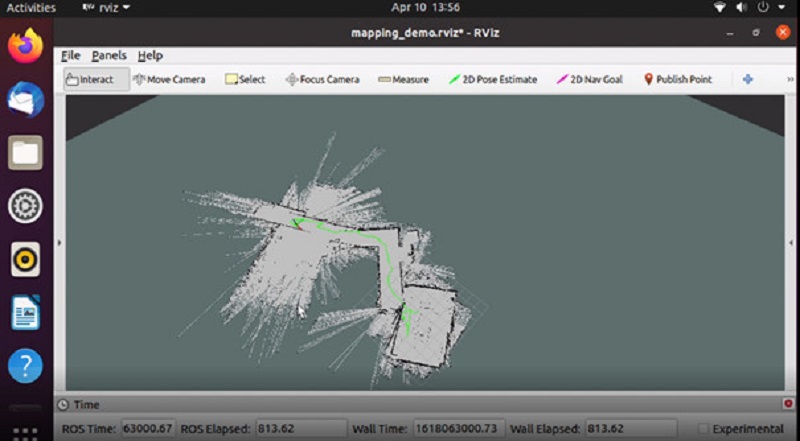
H. 6 Quá trình xây dựng bản đồ tầng 10 nhà A1
Trong thời gian tới nhóm sẽ tiếp tục hoàn thiện phần cứng, phần mềm và đặc biệt là ứng dụng công nghệ xử lý ảnh và AI và hệ điều hành ROS để cài thực các thuật toán điều khiển cho xe tự hành và phát triển thêm cho xe không người lái .
Thứ Sáu, 17:48 16/04/2021

Trường Đại học Công nghiệp Hà Nội (Viện Công nghệ - HaUI) tiếp tục mở rộng mạng lưới đối tác chiến lược, ký kết MOU với Công ty Cổ phân Công nghệ Môi trường NATURAL Việt Nam, triển khai các giải pháp Công nghệ Môi trường.
Thứ Sáu, 14:21 05/12/2025
Lễ ký kết Biên bản ghi nhớ hợp tác về Khoa học và Chuyển giao công nghệ giữa Trường Đại học Công nghiệp Hà Nội (Viện Công nghệ - HaUI) và Công ty TNHH Citiq Việt Nam
Thứ Năm, 15:00 27/11/2025
Trường Đại học Công nghiệp Hà Nội tiếp đón và làm việc cùng Đoàn công tác Sở KH&CN tỉnh Hưng Yên: Kiểm tra nhiệm vụ Khoa học Công nghệ và định hướng mở rộng hợp tác.
Thứ Năm, 10:15 13/11/2025
Đại hội Công đoàn Viện Công nghệ - HaUI nhiệm kỳ 2025–2030 thành công tốt đẹp
Thứ Sáu, 11:11 07/11/2025
Nghiệm thu đề tài khoa học và công nghệ cấp Đại học: Bước tiến trong nghiên cứu chế tạo lớp phủ dụng cụ cắt dùng cho phay cao tốc
Thứ Hai, 09:08 15/06/2026
HaUI nghiệm thu đề tài cấp Thành phố Hà Nội về chế tạo thiết bị tạo hình và tách khuôn gốm sứ tự động
Thứ Hai, 10:14 04/05/2026
Nghiệm thu Cơ sở nhiệm vụ cấp Bộ Công Thương năm 2025 Hỗ trợ Doanh nghiệp nhỏ và vừa (DNNVV) nâng cao năng lực cạnh tranh trong kỷ nguyên số.
Thứ Hai, 09:32 12/01/2026
Nghiệm thu đề tài Khoa học và Công nghệ cấp Trường: Bước tiến mới trong chế tạo vật liệu xử lý nước thải dệt nhuộm bằng phương pháp điện hóa Plasma.
Thứ Tư, 16:21 07/01/2026
Nghiên cứu xây dựng quy trình sản xuất phân bón hữu cơ vi sinh từ nguồn rác thải sinh hoạt.
Thứ Tư, 11:40 17/12/2025Xây dựng Local Web Server phục vụ giám sát và điều khiển xe tự hành
Thứ Năm, 17:09 15/04/2021Hội thảo khoa học chuyên ngành công nghệ hóa thực phẩm
Thứ Ba, 14:13 30/03/2021Nhóm Nghiên cứu khoa học: Thiết kế và xây dựng hệ thống điều khiển Robot ứng dụng trong công nghiệp với quy mô nhỏ trên cơ sở lý thuyết điều khiển nâng cao, trí tuệ nhân tạo và IoT.
Thứ Ba, 10:42 30/03/2021Nghiệm thu đề tài khoa học và công nghệ cấp Tỉnh Vĩnh Phúc do Trường Đại học Công nghiệp Hà Nội chủ trì
Thứ Sáu, 09:50 26/02/2021Nghiệm thu cấp Nhà nước Đề án thuộc Chương trình phát triển công nghiệp hỗ trợ năm 2020
Thứ Sáu, 09:03 26/02/2021Copyright © 2018 Hanoi University of Industry.
